
Avant toute chose, nous devons disposer nos 5 video projecteurs pour projeter sur le dôme.
- Les video projecteurs doivent projeter à eux tous sur tout le dôme et avoir suffisamment de recouvrement entre eux
- La caméra de calibration doit être placée au milieu à la base du dome et doit voir tout le dome

Votre projection devrait ressemblée à cela :

Nous pouvons voir que les projecteurs projettent sur tout le dome et qu’ils se recouvrent suffisamment pour poursuivre.
Preparer la caméra et les video projecteurs
A ce stade, assurez-vous que :
- Tous les projecteurs sont connectés à un V-Node à l’aide d’un cable vidéo
- Leurs paramètres KEYSTONE, OVERSCAN, et NOISE REDUCTION* sont réglés sur OFF/DISABLED.
- La caméra est connectée au Switch POE avec la bonne optique grand angle
Préparer l’environnement
- Cacher ou éteindre toute lumière qui pourrait parasiter la calibration
- Éviter toute réflexion de lumière dans la pièce
Préparer le logiciel de la caméra sur le serveur Modulo Kinetic Designer
1. Installer le driver de la camera : SpinnakerSDK_FULL_1.20.0.15_x64.exe
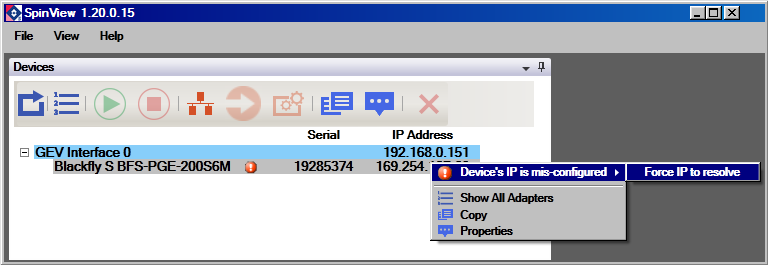
2. Lancer le logiciel “SpinView”
3. Si la caméra a un souci de communication réseau, cliquer droit sur le nom de la caméra puis cliquer sur “Force IP to resolve”
4. Double-cliquer sur la camera correspondant dans la “Camera list” et s’assurer que l’image que la caméra a bien une image.
Save IP configuration
Renseigner l’adresse IP avec une adresse sur la même plage IP que notre serveur Modulo Kinetic Designer, et indiquer que le masque de sous-réseau
Dans notre cas, Kinetic Designer et V-Node sont configurés sur la plage IP 192.168.0.XXX avec le masque de sous-réseau 255.255.255.0

Par défaut, les cameras PtGrey efface l’adresse IP à chaque redémarrage.
Pour éviter cela, cocher la case PERSISTENT IP.

Nous sommes maintenant prêts à lancer le logiciel Modulo Kinetic Designer.
Need more help with this?
Don’t hesitate to contact us here.