
Les caméras sont maintenant configurées et ajoutées au projet Modulo Kinetic Designer.
Nous allons maintenant calibrer leur position dans l’environnement 3D.
Utiliser le Wand (baguette) pour obtenir des points dans l’espace pour la calibration
- Fixer le Wand au baton afin de faire de grands mouvements
- Dans Modulo Kinetic Designer, sélectionner le groupe “TRACKING”
- Dans la fenêtre Editor, changer le mode en Calibration

- Presser ensuite Play
- Une fenêtre pop-up vous demande de confirmer la calibration, cliquer sur OK

- Les caméras du groupe devraient maintenant être vertes dans Kinetic Designer, et leur bague devrait être rouge

- Allumer l’alimentation sur le Wand

- Dès que les caméras verront les LEDS leur bague deviendra verte
Si la bague de la camera est jaune ou rouge, cela signifie que la camera ne voit pas les 3 LEDs de la Wand
- Se déplacer partout tout en faisant des mouvements avec la Wand en s’assurant de parcourir tout l’espace scénique.
S’assurer de faire le plus de mouvements donnera une calibration la plus précise possible.
- Aller dans l’onglet Calib. report pour voir combien de points de calibration vous avez obtenu
- Quand vous avez un nombre suffisant de points, cliquer sur le bouton Stop
- Après la calibration, les résultats de celles-ci sont disponibles dans l’onglet Calib. report

Vérifier que les LEDs sont bien détectées par les cameras
- Dans l’onglet General, changer le mode Tracking, puis cliquer sur le bouton en forme de flèche.
![]()
- Dans la fenêtre des caméras, vous pouvez changer le réglage Visualization en Points afin de voir les ID de chaque LED (émis par le Beacon)

- On peut également retrouver le listing des LEDs et leur ID depuis l’onglet Listing tab.
Calibrer la position du sol dans l’espace (Ground position)
- Pour faire cela, nous utilisons le KineMotion Square (équerre)

- Placer l’Équerre Square à même le sol.
Sur cette équerre, l’axe X sera défini par la branche qui a la plus courte distance entre l’angle et la LED, l’axe Z sera défini quant à lui par la branche avec la plus grande distance.

- Sélectionner le groupe “TRACKING”
- Depuis l’onglet General, sélectionner le mode Tracking puis cliquer sur le bouton Play
- Dans l’onglet Listing tab, vérifier que Modulo Kinetic Designer voit bien les points LEDs de l’Équerre

- Aller dans l’onglet Ground calib. tab
- S’assurer que la case Enable ground calibration est bien décochée afin de faire la calibration du sol
- Sélectionner le Ground plane type. Si vous utilisez l’Équerre du KineMotion kit, alors choisir Official Modulo-Pi depuis la liste
- Ensuite, cliquer sur Calibrate

- Les valeurs de Corner-Smallest distance-Largest distance devraient être mises à jour après la calibration
- On peut observer depuis la 3D Viewer de Kinetic Designer que les caméras ont été correctement placées dans l’espace après cette calibration
- S’assurer que la case Enable ground calibration box est bien cochée

- Une fois cela fait vous pouvez enlever l’Équerre de votre environnement
Relier la position d’un objet 3D (as a sphere) à une LED trackée
- Premièrement, stopper le tracking en cliquant sur le bouton Play
![]()
- Dans la 3D Scenes, ajouter une Sphere
- Dans la fenêtre KineMotion, sélectionner le groupe Tracking, aller dans l’onglet Listing tab, et noter l’ID de la LED

- Depuis l’onglet Objects, cliquer sur + pour ajouter un Point
- Indiquer le numéro de l’ID que nous venons de relever depuis l’onglet Listing. (Dans notre cas, ce numéro d’ID est 1090)
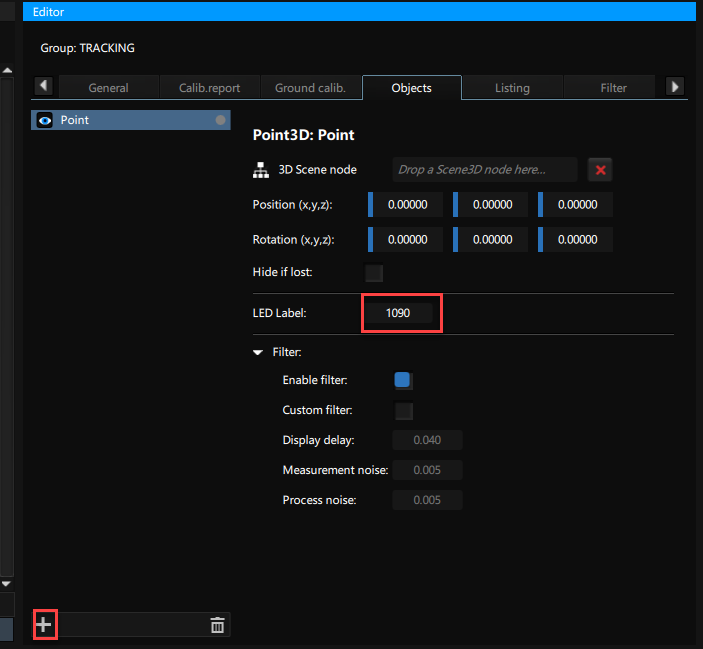
- Ensuite, drag&drop la Node_Sphere dans le champs 3D Scene Mode

- Depuis le 3D Viewer, nous devrions observer que la Sphere se déplace en même temps que nous déplaçons physiquement le point *LED * tracké.

Need more help with this?
Don’t hesitate to contact us here.