
Select this device to communicate with a camera that streams tracking information using the FreeD protocol.
Settings
| Property | Default | Description |
|---|---|---|
| Name | Camera Generic Freed | User-friendly name. |
| Enable | ON | Toggle to enable/disable the device. |
| Run at startup | ON | Toggle to enable the device when Kinetic Designer is launched. |
General tab
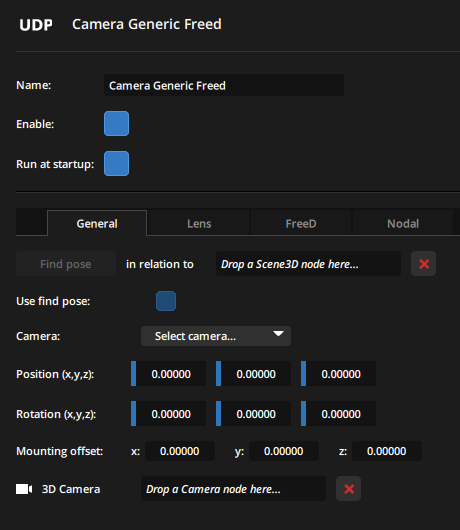
| Property | Default | Description |
|---|---|---|
Find pose |
- | Click to find the camera pose (position + orientation) in the world frame that typically corresponds to the origin of the 3D scene. If the camera is mounted on a moving trackable device (such as ActivePuck), it is possible to compute the camera pose in relation to a node in the 3D scene. To do this, drag & drop the proper node in the corresponding field. Note : The pose of the camera is often referred to as ground transform. |
| Use find pose | ON | Toggle to activate/deactivate the transformation found using the Find pose button. |
| Camera | - | Use the dropdown menu to choose either a pre-calibrated camera or a user defined camera. In the latter case, the camera must be calibrated by the user. |
| Position (x,y,z) | (0.0 ; 0.0 ; 0.0) | Displays the current position of the camera. Each parameter (x, y, and z) can be individually toggled to activate/deactivate them. If the parameter is deactivated the device will not update this value in the 3D camera/projector associated with this device. (in the 3D view) |
| Rotation (x,y,z) | (0.0 ; 0.0 ; 0.0) | Displays the current rotation of the camera. Each parameter (x, y, and z) can be individually toggled to activate/deactivate them. If the parameter is deactivated the device will not update this value in the 3D camera/projector associated with this device. (in the 3D view) |
| Mounting offset | (0.0 ; 0.0 ; 0.0) | Defines an offset between the camera center and the intersection point of the pan/tilt axes. |
| 3D Camera | - | Drag & Drop a camera from a 3D scene to associate it with this device. When associated, the motion of the real camera will be mapped to move the camera in the 3D scene. You can add as many cameras as you want. As soon as you drag & drop a camera in the field, a new empty one will be created. |
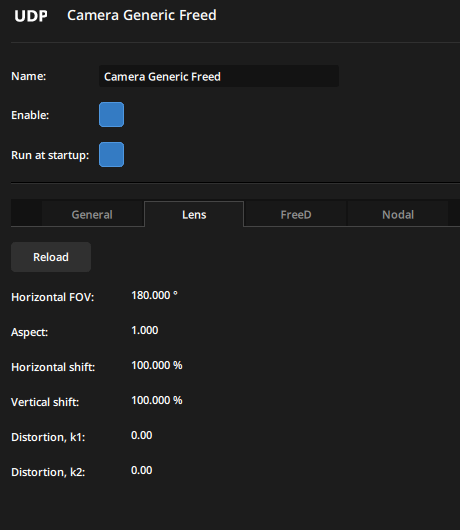
Lens tab
| Property | Default | Description |
|---|---|---|
| Display | ||
| Horizontal FOV | 180.0° | Horizontal field of view in degrees. |
| Aspect | 1.0 | Ratio between image’s width and height. |
| Horizontal shift | 100.0% | Horizontal shift of the lens center (percentage of image width). |
| Vertical shift | 100.0% | Vertical shift of the lens center (percentage of image height). |
| Distortion, k1 | 0.0 | Distortion parameter proportional to the distance from lens center (r^2). |
| Distortion, k2 | 0.0 | Distortion parameter proportional to the squared distance from lens center (r^4). |
This view offers a visualization of the camera’s data, these properties cannot be edited.
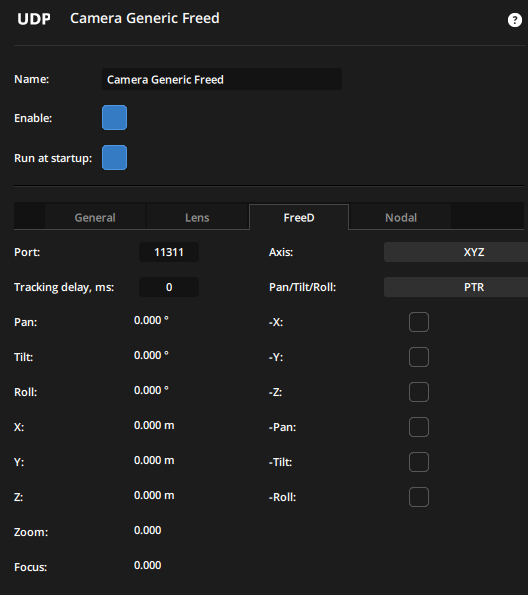
FreeD tab
| Property | Default | Description |
|---|---|---|
| Port | 11311 | TCP/IP port used by the device. |
| Tracking delay, ms | 0 | Generally there is a small desynchronization between the image and tracking information. This parameter enables the user to compensate it by delaying the incomming FreeD data. |
| Axis | XYZ | Select the order of the X, Y and Z axes for the camera. |
| Pan/Tilt/Roll | PTR | Select the order of the Pan, Tilt and Roll functions for the camera. |
| -X | OFF | Toggle to invert the X axis. |
| -Y | OFF | Toggle to invert the Y axis. |
| -Z | OFF | Toggle to invert the Z axis. |
| -Pan | OFF | Toggle to invert the Pan axis. |
| -Tilt | OFF | Toggle to invert the Tilt axis. |
| -Roll | OFF | Toggle to invert the Roll axis. |
| Display | ||
| Pan | 0.0° | Value of pan in degrees received by FreeD protocol |
| Tilt | 0.0° | Value of tilt in degrees received by FreeD protocol |
| Roll | 0.0° | Value of roll in degrees received by FreeD protocol |
| X | 0.0 | Camera x position in meters received by FreeD protocol |
| Y | 0.0 | Camera y position in meters received by FreeD protocol |
| Z | 0.0 | Camera z position in meters received by FreeD protocol |
| Zoom | 0.0 | Camera zoom received by FreeD protocol (typically in a range from 0 to 1) |
| Focus | 0.0 | Camera focus received by FreeD protocol (typically in a range from 0 to 1) |
Part of this view offers a visualization of the camera’s data, properties in this part cannot be edited.
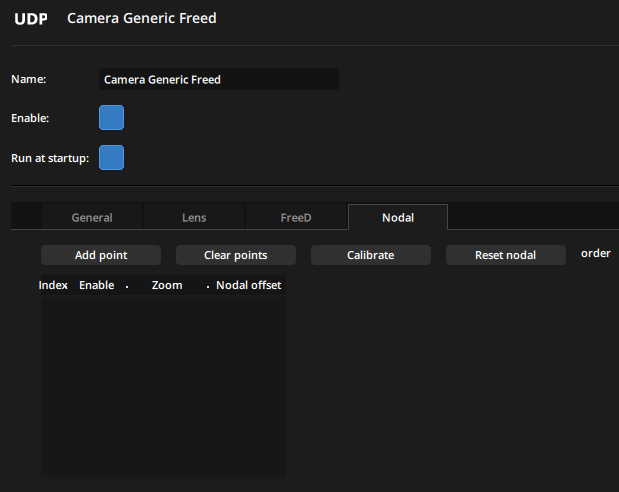
Nodal tab
Task action
| Action | Description |
|---|---|
| Enable device | Enable the device |
| Disable device | Disable the device |
Task trigger
This device has no actions that can trigger a Task.
Digimap trigger
This device cannot be used as a Digimap trigger.
Graph
| Action | Description |
|---|---|
| PanTiltRoll | Receive current camera orientation (angles in degrees) |
| ZoomFocus | Receive current camera zoom and focus |
| XYZ | Receive current camera position in 3D space in meters |
| Intrinsics | Receive camera calibration parameters |
| Pose | Receive camera pose (position + orientation) |
| Autocontrol | Adjust Pan/Tilt/Zoom speed to follow a target |
User interface
This device has no actions that can be launched from the UI designer.
Need more help with this?
Don’t hesitate to contact us here.